CONTRACT NO. HY/2012/07
Hong Kong-Zhuhai-Macao Bridge
Tuen Mun �V Chek Lap Kok Link (Southern
Connection Viaduct Section)
Proposal for Land-based Dolphin Behavioural
and Movement Monitoring
Prepared by Hong Kong
Cetacean Research Project
(Professor Bernd Würsig, Dr. David
Lundquist and Dr. Samuel Hung)
September
5, 2013
1.
INTRODUCTION
The Tuen
Mun-Chek Lap Kok Link (TM-CLKL)
comprises a 1.6 km long dual 2-lane viaduct section between the Hong Kong
Boundary Crossing Facilities (HKBCF) and the North Lantau Highway
and associated roads at Tai Ho. Gammon
Construction Limited (hereinafter called the ��Contractor��) was awarded as the
main contractor of ��Contract No. HY/2012/07 �V Hong Kong-Zhuhai-Macao
Bridge Tuen Mun-Chek Lap Kok Link �V Southern Connection Viaduct Section��.
According to the TM-CLKL EM&A
Manual, a number of environmental monitoring and audit (EM&A) works related
to Chinese white dolphins (a.k.a Indo-Pacific
humpback dolphins, Sousa chinensis) shall be conducted during baseline,
construction and post-construction phases, including land-based dolphin behavioural and movement monitoring, to record and note any
changes in response of dolphins to the bored piling noise. Such monitoring shall be undertaken by
qualified dolphin specialist, who have sufficient relevant post-graduate
experience and publication in the respective aspects. Approval on the specialist responsible
for land-based dolphin behavioural and movement
monitoring shall be sought from AFCD and EPD.
This land-based dolphin behavioural and movement monitoring proposal will detail
the methodology as well as personnel arrangement/qualification to meet the
requirement in the particular specification and EM&A Manual. It is prepared and submitted for
approval of the baseline, construction and post-construction monitoring
works. It should also be noted that
the land-based theodolite monitoring will not be carried out concurrently with
the underwater noise monitoring and acoustic behaviour
monitoring for both baseline and construction phase monitoring.
2.
LAND-BASED
DOLPHIN BEHAVIOURAL AND MOVEMENT MONITORING PROGRAMME
2.1. Requirements under the EM&A Manual
Under
the TM-CLKL EM&A Manual, the land-based dolphin behavioural
and movement monitoring in relation to bored piling activities is required with
several clauses:
-
Clause 6.4.5.7:
The objective of the land-based theodolite tracking of dolphins is to
monitor their movements and behaviour near the bored
piling works site before, during and after the works and record and note any
changes in response to the bored piling noise. The details of the land-based
dolphin tracking methodology and frequency will be defined in a specification
prepared during detailed design phase. However, as a minimum the monitoring is
likely to comprise 30 days before, 30 days during and 30 days after bored piling works.
-
Clause 6.4.5.8: This monitoring would
consist of data acquisition and analyses of movement and behavioural
information of CWD, as gained from a 5-sec. resolution conventional theodolite
and a 5-sec. resolution ��total station�� theodolite with laser range-finding capability,
appropriate hand-held range finders, binoculars with distance-measuring reticles
and built-in compass, recording gear of digital voice recorder, data sheets,
and computer slaved to theodolites.
-
Clause 6.4.5.9: Two experienced
theodolite/behavioural data gathering operators
should undertake the monitoring. The primary and secondary theodolite operators
should have at least ten years of theodolite and behavioural
data gathering and analysis experience, at least three technical publications
to cover the subject, and appropriate long-term familiarity with the latest
version of the tracking program ��Pythagoras��. These experienced operators need
to have further experience in detailed power analyses for efficient evaluation
of number of samples and time/energy needed for statistical evaluations.
2.2. Monitoring Location �V Pak Mong Station
To
conduct the land-based monitoring on dolphin behaviour
and movement, HKCRP research team has set up a theodolite-tracking station at Pak
Mong near Tai Ho Wan in August 2013 with the
assistance of Professor Bernd Würsig and Ms. Sarah Piwetz, following the same methodology that was used to set
up other well-established theodolite tracking stations in Hong Kong since 2011 (Hung
2012, 2013; Piwetz et al. 2012).
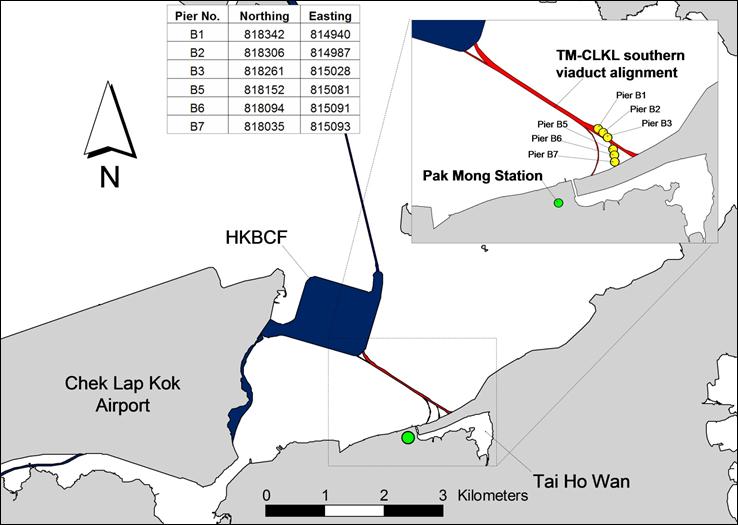
The
Pak Mong station near Tai Ho Wan is located near the
northeast coast of Lantau Island
(GPS position: 22o17.86�� N and 113o57.98��
E; Figure 1). The station was
selected based on its height above sea level (minimum requirement of over 20 m;
Würsig et al. 1991), close proximity to shore, and
relatively unobstructed views of the TM-CLKL alignment (see panoramic view from
the station in Figure 2). The
height of Pak Mong station established by HKCRP team is
24.88 m high at mean low water (or 24.73 m relative to mPD)
and 170 m from shore. Moreover, the
station is only situated 650-780 m from the six bored piling sites of TM-CLKL southern
viaduct section that will be monitored during the present study (i.e. Piers B1-3,
B5-7; Figure 1), which will be ideal for the purpose of the present behavioural and movement monitoring in relation to the TM-CLKL
bored piling works.
2.3. Monitoring Frequency
According
to the EM&A Manual, dolphin behaviour in response
to bored piling works and movement near the bored piling sites should be
monitored for a minimum of 30 days before, 30 days during and 30 days after
bored piling works near the works site.
The monitoring frequency is consistent with other EM&A programs for
the HZMB works, including the Hong Kong Link Road bored piling monitoring programme.
Thirty days (with 5-6 hours on
each survey day) of monitoring will be planned for the baseline, construction
and post-construction phases respectively, with the tentative commencement date
of baseline monitoring to be late August 2013. It should be noted that every attempt
will be made to conduct the monitoring works in favourable
weather conditions (Beaufort Sea State 3 or below; good visibility of 3 km or
above), and such works will not be conducted under adverse weather condition
(e.g. with heavy rain, poor visibility and monsoon). Due to the fluctuating weather condition
in the area during different times of the day and among the four seasons, the
HKCRP team will aim to collect at least 80% of the total survey effort in favourable conditions in order to generate an adequate
amount of data for various analyses.
2.4. Monitoring Methodology
The methodology
of the present monitoring programme generally follows
the one established under the Piwetz et al. 2012
study, which is also part of the AFCD long-term marine mammal monitoring programme (Hung 2012, 2013). On each survey day, observers will
search systematically for Chinese white dolphins using the unaided eye and
handheld binoculars (7 x 50) from the Pak Mong
Station, overlooking the viaduct alignment to the northeast coast of Lantau Island, in particular the area around the six bored
pile sites as indicated in Figure 1.
Notably, all six bored piling sites will be monitored during baseline
phase, while three of these six sites will be chosen for construction phase and
post-construction phase monitoring when the initial phase of the construction
schedule is confirmed.
A theodolite
tracking session will be initiated when an individual dolphin or group of
dolphins is located, and focal follow methods will be used to track the
dolphins. Within a group, a focal
individual will be selected for the purposes of tracking the behaviour and movement of the group, based on its
distinctive feature such as colouration or severe
injury mark. The focal individual
will then be tracked continuously via the theodolite, with positions recorded
whenever the dolphin surfaces. If
an individual cannot be positively distinguished from other members, the group
will be tracked by recording positions based on a central point within the
group when the dolphins surface.
Tracking will
continue until animals are lost from view, move beyond the range of reliable
visibility (> 5 km), or when environmental conditions obstruct visibility
(e.g. intense haze). Behavioural state data (Table 1) will also be recorded
every 5 minutes for the focal individual or group. This interval is long enough to allow
for determination of the behavioural state, and short enough to capture
behavioural responses to the bored piling activities. Moreover, when multiple groups
or individuals are present in the study area, attempts will be made to record
the behaviours of all groups/individuals every 10 minutes, with spotters
assisting in determining behaviour of the dolphins.
Positions of dolphins, boats and
construction activities will be measured using a Sokkisha
DT5 digital theodolite with �� 5-sec precision and 30-power magnification
connected to a laptop computer running the program Pythagoras Version 1.2 (Gailey
and Ortega-Ortiz 2002). This
program calculates a real-time conversion of horizontal and vertical angles
collected by the theodolite into geographic positions of latitude and longitude
each time a fix is initiated. Pythagoras also displays positions,
movements, and distances in real-time.
When possible, the position of the focal dolphin will be recorded at
every surfacing with use of Pythagoras. The position, type, and activity of all
vessels within 5 km of the focal dolphin will also be recorded. An effort will be made to obtain at
least several positions for each vessel, and additional positions will be
acquired when vessels change course or speed.
While the primary source of human
disturbance to dolphins of interest in this study is bored piling works for the
TM-CLKL Project, the presence of vessels may also have an effect on the
behaviour and movement patterns of dolphins. Prior to the construction phase (i.e.
baseline phase), the simultaneous tracking of dolphins and boats over time will
provide information on the speed and orientation of dolphins, as well as their
movements in relation to vessel activities. This data will be used as a baseline for
comparison once construction begins.
Other construction activities and vessel movements in relation to
the bored piling works will be recorded during the construction phase
monitoring, and the same theodolite tracking and behavioural
procedures will be followed as during baseline phase.
2.5. Data Analysis
2.5.1. Assessment
on potential impacts from bored piling activities
2.5.1.1. Movement patterns
To evaluate if dolphin behaviour or
movement patterns vary in the presence of vessels in the baseline phase, it is
necessary to determine how many vessels are present with the focal group at any
time. A vessel will be considered
to be present with the focal dolphin when the two are within 500 metres of each
other. Data recorded in Pythagoras will be used to calculate
dolphin and vessel positions in latitude and longitude for this
comparison. If two consecutive
fixes in a track for one dolphin are more than 300 seconds apart, the track
will be split at this point, which will be analysed separately. Dolphin and vessel positions will be
interpolated every 150 seconds, assuming linear travel at a constant speed
between subsequent positions.
Distance between the focal individual/group and each vessel will be
calculated to determine how many vessels are within 500 metres of the group at
each point.
Tracks
will be split into 10-minute segments and the maximum number and type of vessels
present calculated for each segment, as well as bored piling activity state
during the construction phase. Response variables, including mean
leg speed, mean inter-breath interval, reorientation rate and linearity, will
be calculated for each segment for both baseline and construction phases of
monitoring. These response
variables have been commonly used by many researchers, including the dolphin
specialists of the present project (Lunquist et al.
2012a; Lundquist 2012; Lundquist and Markowitz 2009). Leg speed (km/hr)
is the displacement between two successive points divided by the time
interval. Inter-breath interval (s)
is the length of time between successive surfacings. Reorientation rate (˚/min) is a measure
of how much the group changed course over time. It is calculated as the sum of the
absolute values of heading changes (defined as 0 to 180 degrees relative to the
current bearing) divided by the duration of the track in minutes. Linearity is a dimensionless index
ranging from 0 (no net movement) to 1 (straight line). It is calculated by dividing net
distance from the first to last fix of a track by the sum of all the distances
for each leg.
Multiple
segments within a track cannot be considered statistically independent, thus
analysis of each as a single sample results in pseudoreplication. The time interval required between two
segments from the same track for them to no longer show autocorrelation will be
calculated in a preliminary analysis using linear mixed-effect modelling in R. Segments will be filtered based upon the
results of the autocorrelation analysis.
Generalised
additive models will be fitted using package mgcv in R to describe heterogeneity in dolphin
responses to vessels and bored piling activities. This package uses thin-plate regression
splines to fit smooth terms for the explanatory variables. It includes a penalty for excessive
flexibility, which is determined by the number of knots used to model the
smoothed relationship for each model term.
Smoothing is automated for all model terms simultaneously, with the
multiple generalised cross-validation (GCV) score used within a maximum
likelihood framework to evaluate fit of the model. Simultaneous evaluation (rather than
one-by-one) avoids problems inherent to many step-wise procedures.
To aid
model convergence, the number of knots in each spline will be left at the
default of 10 (9 degrees of freedom).
Histograms will be evaluated for each response variable to determine the
appropriate distribution and link function to use. The fully saturated model is:
y ~ s(NumberOfBoats)
+ TypeOfBoats + ConstructionActivity
The procedure for dropping terms
from the model is based on rules specified by Wood (2001). Smooth terms will be dropped if three
conditions are met:
1.
The estimated degrees of freedom (e.d.f.) is close to 1
2.
The confidence interval for the term includes
zero everywhere
3.
The GCV score drops and deviance explained
increases when the term is removed
If the first condition is met but
not the other two, the smooth term will be replaced with a linear term for that
variable. Linear terms will be
dropped if:
1.
The parameter coefficient is close to 0
2.
The significance of the term is near to 1
3.
The GCV score drops and deviance explained
increases when the term is removed
In summary, the abovementioned
analytical technique (based on a previous study by Bain et al. 2006) utilizes a
model which includes all factors of interest in which the dolphin movement
might be affected (hence called ��fully saturated model��, which includes all
factors). A statistical technique
(i.e. generalized addictive modeling) is then used to fit the data to the model
and determine which factors predict differences in dolphin movement and
describe the heterogeneity in the response. From these results, it can be determined
whether human activities have influenced dolphin movements.
For comparison of monitoring data
collected between different phases, the analysis of data from the baseline
phase will first be performed to determine whether there are influences due to
vessel presence in the absence of construction activity. Then the construction phase data will
also be added into the model (while keeping the baseline data as well) and
recalculated. If the construction
activity (i.e. bored piling works) is a significant factor in the best-fitting
model, then it is evident that dolphin movements were in fact affected by the
construction activity.
2.5.1.2. Behavioural state
Since
consecutive behavioural observations are not likely
to be statistically independent, they will be analyzed as a series of
time-discrete Markov chains.
First-order Markov chain analyses will be used to quantify the
dependence of each behaviour event on the preceding
event in the behavioural sequence. Defining a set of mutually exclusive and
wholly inclusive behaviours (Table 1) permits
analysis of variation in behaviour of dolphin groups
using Markov chains. Notably, the
same set of variables for behavioural state (see
Table 1) will be collected in both baseline, construction and post-construction
phases of monitoring to maintain consistency. This form of analysis of behavioural impacts of human activity has been widely used
in past cetacean studies (Lusseau 2003; Lundquist et
al. 2012a, b).
Each 10 min
sample will be classified according to the behavioural
state and number of vessels present, as well as bored piling activity state
during the construction phase.
Markov chains will be used to build transition matrices of preceding behaviour (at time 0) versus succeeding behaviour
(at time 1) for each transition split by vessel presence/absence and bored
piling activity state. A transition
will only be included in the "no vessel" chain when no vessels are
present for at least 15 min prior to the observation period in order to reduce
the likelihood that dolphin behaviour was altered due
to a vessel interaction.
In the
baseline phase, two chains (behaviour when no vessels
are present vs. behaviour when vessels are present)
will be compared using log-linear analysis as described below. In the construction phase, two sets of
chains (baseline vs. construction with vessels present, and baseline vs.
construction with no vessels present) will also be compared. Any differences between these chains
will help determine if human activities have a significant effect on behavioural transitions of dolphins, and indicate whether
dolphins have behaved differently due to the construction activity. Notably, if no difference is found
between the two chains in the baseline phase, all of the baseline data can then
be combined for comparison to the data collected in the construction
phase. In that case, the comparison
during construction phase will simply be between two chains: baseline phase behavioural data vs. construction phase behavioural
data (i.e. there will be no need to split the data by vessel presence).
Log-linear
analysis (LLA) will be conducted in R to
test whether the likelihood of dolphins moving from one behavioural
state to another is affected by human activities. This will be accomplished by using count
data from the transition matrices and testing models in R for all combinations of parameters and interactions between
parameters: 5 preceding behaviours x 5 succeeding behaviours x 2 vessel conditions x different bored piling
activity states. The two vessel
conditions would be: 1) no vessels present, and 2) vessels present. The different bored piling activity
states will be further defined when different stages of bored piling procedure
are confirmed with the engineers before construction commences, but will at
least include two activity states: 1) no construction activity being conducted,
and 2) construction activity being conducted. Maximum likelihood for the model being
tested is approximated by G2. Comparing the goodness-of-fit for each
model to the goodness-of-fit for the fully saturated model (∆G2) approximates the effect
of the missing variables. Degrees
of freedom are the difference in degrees of freedom between the two models
being compared. Evaluating the significance
of this difference determines which variables are significant. Akaike
Information Criteria (AIC) values will be calculated and used to choose the
best-fitting model.
Based on the results from the
LLA, the transition matrices will be used to calculate the behavioural
budget of dolphins in the absence and presence of human activities. The left eigenvector of the dominant
eigenvalue of each transition matrix will be used to approximate the behavioural budget of dolphins under the conditions of the
matrix. A Z test for proportions
will be used to test for differences between behavioural
budgets, and 95% confidence intervals will be calculated.
3. KEY PERSONNEL AND
QUALIFICATIONS
According to the EM&A
requirement, the present land-based dolphin behaviour
and movement monitoring should be undertaken by suitably qualified
specialist(s) with sufficient (at 10 years) experience in theodolite and behavioural data gathering and analysis, at least three
technical publications to cover the subject, and appropriate long-term
familiarity with the latest version of the tracking program ��Pythagoras��. Approval on the specialist(s)
responsible for this ecological monitoring survey should be sought from AFCD
and EPD.
To
satisfy this requirement, HKCRP will employ Professor Bernd Würsig, the Senior
Research Consultant of HKCRP, and Dr.
David Lundquist, the Research Consultant of HKCRP, to serve as dolphin
specialists for this project.
Professor Würsig is a world-renowned marine
mammal biologist, and has been studying many cetacean species in the past 30
years. Professor Würsig has pioneered several major research techniques,
including theodolite tracking and photographic recognition of marine mammals,
that are widely applied across the marine mammal field of science, and his
experience in theodolite tracking on cetaceans is unparalleled in the
world. Professor Würsig has published over 140 peer-reviewed journal
articles and book chapters, with many on the topic of land-based theodolite
tracking works to study the behaviour and movement of
cetaceans. In fact, the only two
publications on theodolite tracking works on Chinese white dolphins in Hong
Kong were authored (Würsig et al. 2000) and
supervised/co-authored (Piwetz et al. 2012) by
Professor Würsig (both were included in the appendix
for reference) . His unique
experience in shore-based theodolite tracking and extensive knowledge on
Chinese white dolphins and Hong Kong marine
environment will greatly enhance the success of the present study. For the presents study, Professor Würsig will be responsible to oversee the entire study, by
developing the methodology proposal, supervising the local field works with Dr.
Samuel Hung, conducting data analyses with the assistance of Dr. David
Lundquist, writing up the reports, and answering any queries in relation to the
land-based study. His detailed CV
is included in the Appendix.
Dr.
David Lundquist will serve as another dolphin specialist for the project, and
will assist Professor Würsig in various data analyses
under the present study. Dr.
Lundquist has over ten years of theodolite tracking experience, and the topics
of his master��s thesis and Ph.D. dissertation were on behaviour
and movement patterns of southern right whales and dusky dolphins respectively,
utilizing land-based theodolite tracking data to examine the effects of
ecotourism activities. Dr.
Lundquist is very experienced in advanced analysis of theodolite tracking and behavioural data, and has published several papers on such
works, including the movements of Chinese white dolphins in Hong
Kong in response to vessel movements (Piwetz
et al. 2012). He will assist
Professor Würsig for the writing up of various
reports and answering any queries in relation to the present study. The CV of Dr. Lundquist is included in
the Appendix.
For
the local field works, Professor Würsig and Dr.
Lundquist will supervise the HKCRP research team, led by Dr. Samuel Hung, the Director of HKCRP. Since 1997, Dr. Hung has been
extensively involved in the multi-disciplinary research on Chinese white
dolphins in Hong Kong and nearby regions, and
has been widely recognized as the leading marine mammal expert in Hong Kong. He
has 16 years of field experience in studying Chinese white dolphins, and has
profound knowledge and experience on different cetacean research and monitoring
techniques. In 2011, under the
close supervision of Professor Würsig, Dr. Hung and
his research team have successfully initiated a long-term study on
investigating dolphin behaviour and movements using
shore-based theodolite tracking technique (Hung 2012). This pioneer study has helped to
understand the potential disturbance effects of vessel movements and associated
underwater noises on dolphins (Piwetz et al.
2012). The CV of Dr. Hung is included
in the Appendix.
The
local theodolite tracking team will be composed of three main personnel: one
primary theodolite operator, one computer operator, and one dolphin observer
(i.e. spotter). The primary
theodolite operator would require the most relevant experience, and this
important role will be fulfilled by two key staff of HKCRP, Mr. Vincent Ho and Mr. Perry Chan. Mr. Ho
and Mr. Chan were both trained and endorsed by Professor Würsig
in April 2011, and their field works have been regularly audited by Professor Würsig in 2012 and 2013. Both have over two years of extensive theodolite
tracking experience in Hong Kong, including
all tracking works from various theodolite tracking stations in Hong Kong.
They have helped Professor Würsig to set up
the theodolite tracking station at Pak Mong in August
2013, and have been extensively involved in the field works of theodolite
tracking for AFCD long-term monitoring project since then. Moreover, both have been extensively
involved with the recent land-based theodolite tracking works for the EIA study
of the Third Runway Expansion Project commissioned by the Airport Authority,
the EM&A study of the Hong Kong Link Road (section between HKSAR Boundary
and Scenic Hill) for Dragages-China Harbour-VSL Joint Venture, and the feasibility study for
Increasing Land Supply by Reclamation and Rock Cavern Development commissioned
by CEDD, all under the close supervision of Professor Würsig
and Dr. Samuel Hung. Their unique
field experience in land-based theodolite tracking on small cetaceans in Hong Kong is unparalleled, and both are uniquely
qualified to undertake the specialized field works for the present study. Their CVs are included in the Appendix.
Besides
Mr. Ho and Mr. Chan as the primary theodolite operators, the theodolite
tracking works will be supported by the strong field team of HKCRP. All HKCRP research assistants, with the
training and supervision of Professor Würsig, Dr.
Samuel Hung, Mr. Ho and Mr. Chan, will be allocated to rotate into the
positions of computer operator and dolphin observer. Dr. Hung will supervise the field work
team closely, and will audit the field works periodically to ensure the data
quality is consistent.
4. REPORTING
According
to EM&A Manual, the Environmental Team (ET) Leader shall prepare and submit
a Baseline Environmental Monitoring Report within 10 working days of completion
of the baseline monitoring. The
baseline monitoring report will include at least the following information:
-
up to half a page executive summary;
-
brief project background information;
-
drawings showing locations of the baseline
monitoring stations;
-
monitoring results together with the following
information:
- monitoring
methodology;
- parameters
monitored;
- monitoring
locations; and
- monitoring date, time frequency and
duration;
-
details of influencing factors, including:
- major
activities, if any, being carried out on the site during the period;
- weather
conditions during the period; and
- other
factors which might affect the monitoring results;
-
determination of the Action and Limit Levels for
each monitoring parameter and statistical analysis of the baseline data; and
-
comments, recommendations and conclusions.
For the reporting schedule, the
results and findings from the 30-day baseline period shall be prepared and
submitted as a Baseline Environmental Monitoring Report within 10 working days
of completion of the baseline monitoring.
Moreover, a Interim Monitoring Report
including the results and findings from the 30-day construction phase period
will also be prepared and submitted within 30 days of completion of the
construction phase monitoring.
Finally, upon the completion of the 30 days of post-construction phase
monitoring, a Final Monitoring Report shall be prepared and submitted within 30
days. Copies of the Baseline
Environmental Monitoring Report, Interim Monitoring Report and Final Monitoring
Report on dolphin behaviour and movement in response
to bored piling activities shall be submitted to the Contractor, the IEC, the SOR,
AFCD, EPD as appropriate.
5. EVENT AND ACTION PLAN
According to Section 6.5 of the
EM&A Manual, the Action and Limit Levels and event-action plan for ecology
shall be proposed upon the baseline monitoring data, and agreed by AFCD and
EPD. Since the baseline condition
has yet to be established, only a conceptual Event and Action Plan is included
here based on response variables for dolphin movement patterns (i.e. mean leg
speed, mean inter-breath interval, reorientation rate and linearity) and
dolphin behaviours (five different behavioural states), which will be recorded during both
baseline and construction phase monitoring works.
To determine the Action and Limit
Levels, we propose to take all baseline data into account, including times with
no apparent anthropogenic activities near the dolphins, various vessel
activities, and time of day and other variables. Departures of any of these variables
between baseline and construction phases with a 20% difference will be of
concern and should trigger the Action Level under the Event Action Plan. If a 40% difference in any of
these variables between baseline and construction phases is detected, then the
Limit Level under the Event Action Plan should be triggered and immediate
action will be required. The
detailed Event and Action Plan is presented as follow:
Conceptual Event and
Action Plan
|
EVENT
|
ACTION
|
|
ET Leader
|
IEC
|
SO
|
Contractor
|
|
Action
Level
If any of the response variable for dolphin movement
patterns (speed, inter-breath interval, reorientation rate & linearity)
and behaviour (proportion of time spent in each behavioural state) recorded in the construction phase
monitoring is 20% higher or lower
than that recorded in the baseline monitoring, action level should be
triggered
|
1. Repeat
statistical data analysis to confirm findings;
2. Review all
available and relevant data to ascertain if differences are as a result of
natural variation or seasonal differences;
3. Identify source(s) of impact;
4. Inform the
IEC, SO and Contractor;
5. Check monitoring data;
6. Carry out
audit to ensure all dolphin protective measures are implemented fully and
additional measures be proposed if necessary
|
1. Check
monitoring data submitted by ET and Contractor;
2. Discuss
monitoring with the ET and the Contractor;
|
1. Discuss
with the IEC the repeat monitoring and any other measures proposed by the ET;
2. Make
agreement on measures to be implemented.
|
1. Inform the SO
and confirm notification of the non- compliance in writing;
2. Discuss
with the ET and the IEC and propose measures to the IEC and the SO;
3. Implement
the agreed measures.
|
|
Limit
Level
If any of the response variable for dolphin movement
patterns (speed, inter-breath interval, reorientation rate & linearity)
and behaviour (proportion of time spent in each behavioural state) recorded in the construction phase
monitoring is 40% higher or lower
than that recorded in the baseline monitoring, limit level should be
triggered
|
1. Repeat
statistical data analysis to confirm findings;
2. Review all
available and relevant data to ascertain if differences are as a result of
natural variation or seasonal differences;
3. Identify source(s) of impact;
4. Inform the
IEC, SO and Contractor;
5. Check monitoring data;
6. Carry out
audit to ensure all dolphin protective measures are implemented fully and
additional measures be proposed if necessary
7. Discuss
additional dolphin monitoring and any other potential mitigation measures
(e.g. consider to temporarily stop relevant portion of construction activity)
with the IEC and Contractor.
|
1. Check
monitoring data submitted by ET and Contractor;
2. Discuss monitoring
with the ET and the Contractor;
3. Review
proposals for additional monitoring and any other measures submitted by the
Contractor and advise ER accordingly.
|
1. Discuss
with the IEC the repeat monitoring and any other measures proposed by the ET;
2. Make
agreement on measures to be implemented.
|
1. Inform the SO
and confirm notification of the non- compliance in writing;
2. Discuss
with the ET and the IEC and propose measures to the IEC and the SO;
3. Implement
the agreed measures.
|
Abbreviations: ET �V
Environmental Team, IEC �V Independent Environmental Checker, SO �V Supervising
Officer
6. REFERENCE
Bain, D.E., R. Williams, J.C. Smith, and D. Lusseau. 2006.
Effects of vessels on the behavior of southern resident killer whales (Orcinus spp.) 2003-2005. NMFS contract report
AB133F05SE3965. 65pp.
Gailey, G. A. and Ortega-Ortiz
J. 2002. A note on a computer-based system for theodolite
tracking of cetaceans. Journal of Cetacean Research and
Management 4: 213-218.
Hung, S. K.
2012. Monitoring of Marine
Mammals in Hong Kong waters: final report
(2011-12). An unpublished report submitted to the
Agriculture, Fisheries and Conservation Department, 171 pp.
Hung, S. K. 2013. Monitoring of Marine Mammals in Hong Kong waters: final report
(2012-13). An unpublished report submitted to the
Agriculture, Fisheries and Conservation Department, 168 pp.
Lundquist, D. 2012. Behaviour
and movement patterns of dusky dolphins (Lagenorhynchus obscurus) off
Kaikoura, New Zealand: Effects of tourism. Ph.D. Thesis, University of Otago. http://hdl.handle.net/10523/2125
Lundquist, D., Sironi, M.,
Würsig, B., Rowntree, V., Martino, J. and Lundquist, L. 2012a. Response of southern right whales
to simulated swim-with-whale tourism at Península Valdés, Argentina. Marine Mammal
Science. DOI:
10.1111/j.1748-7692.2012.00583.x
Lundquist, D., Gemmell,
N. and Würsig, B. 2012b. Behavioural
responses of dusky dolphin groups to tour vessels off Kaikoura, New Zealand. PLoS ONE. DOI:
10.1371/ journal.pone.0041969
Lundquist, D.J.
and Markowitz, T. M. 2009. Effects of tourism on behaviour and movement patterns of dusky dolphin groups
monitored from shore stations. Pp 9-22 in T.M.
Markowitz, S. DuFresne, and B. Würsig
(eds.) Tourism effects on dusky dolphins at Kaikoura, New Zealand. Report submitted to New Zealand
Department of Conservation, Wellington.
Lusseau, D. 2003.
Effects of tour boats on the behavior of bottlenose dolphins: using
Markov chains to model anthropogenic impacts. Conservation Biology 17:1785-1793.
Piwetz, S., Hung, S. K., Wang J.
Y., Lundquist, D. and Würsig, B. 2012. Influence of vessel
traffic on movements of
Indo-Pacific humpback dolphins (Sousa chinensis) off Lantau Island, Hong Kong. Aquatic Mammals 38: 325-331.
Würsig, B., Cipriano,
F., and Würsig, M. 1991. Dolphin movement patterns: Information
from
radio and theodolite tracking
studies. In: K. Pryor and K. S.
Norris (editors), Dolphin Societies: Discoveries and Puzzles, pp. 79-112, Los Angeles: University of California Press.
Table 1. Definitions of group behavioural states of dolphins.
|
State
|
Definition
|
|
Resting
|
Dolphins
close to the surface and each other, surfacing at regular intervals and in a
coordinated fashion. Movement
very slow.
|
|
Traveling
|
All
individuals oriented and moving in the same direction. This behavioural
state includes all high-speed, directional behaviours
(e.g. porpoising).
|
|
Milling
|
Individuals
within the group simultaneously moving in different directions, with no
overall clear direction of travel.
|
|
Socialising
|
Physical
interactions taking place among members of the group, including chasing, high
levels of body contact, coordinated clean leaps and noisy leaps.
|
|
Feeding
|
Dolphins
observed either capturing or pursuing fish at the surface. High number of non-coordinated
re-entry leaps, rapid changes in direction and long dives. Dolphin rostrum or body covered with
mud. Associations with operating
fishing boats.
|